Chapter 10 Basic Concepts of Descriptive Vector Geometry
Section 10.1 From Arrows to Vectors10.1.3 Vectors in the Plane and in the Space
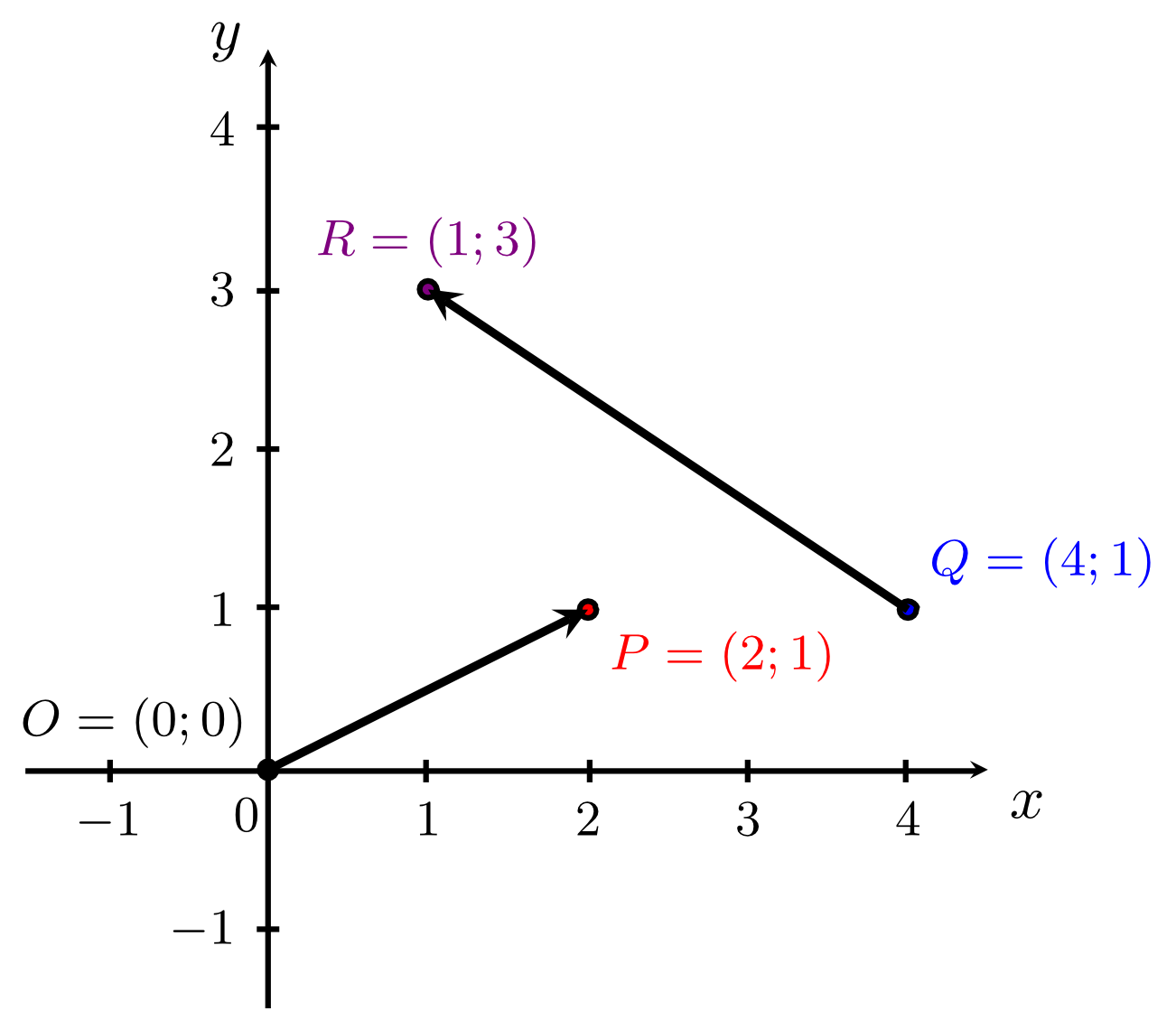
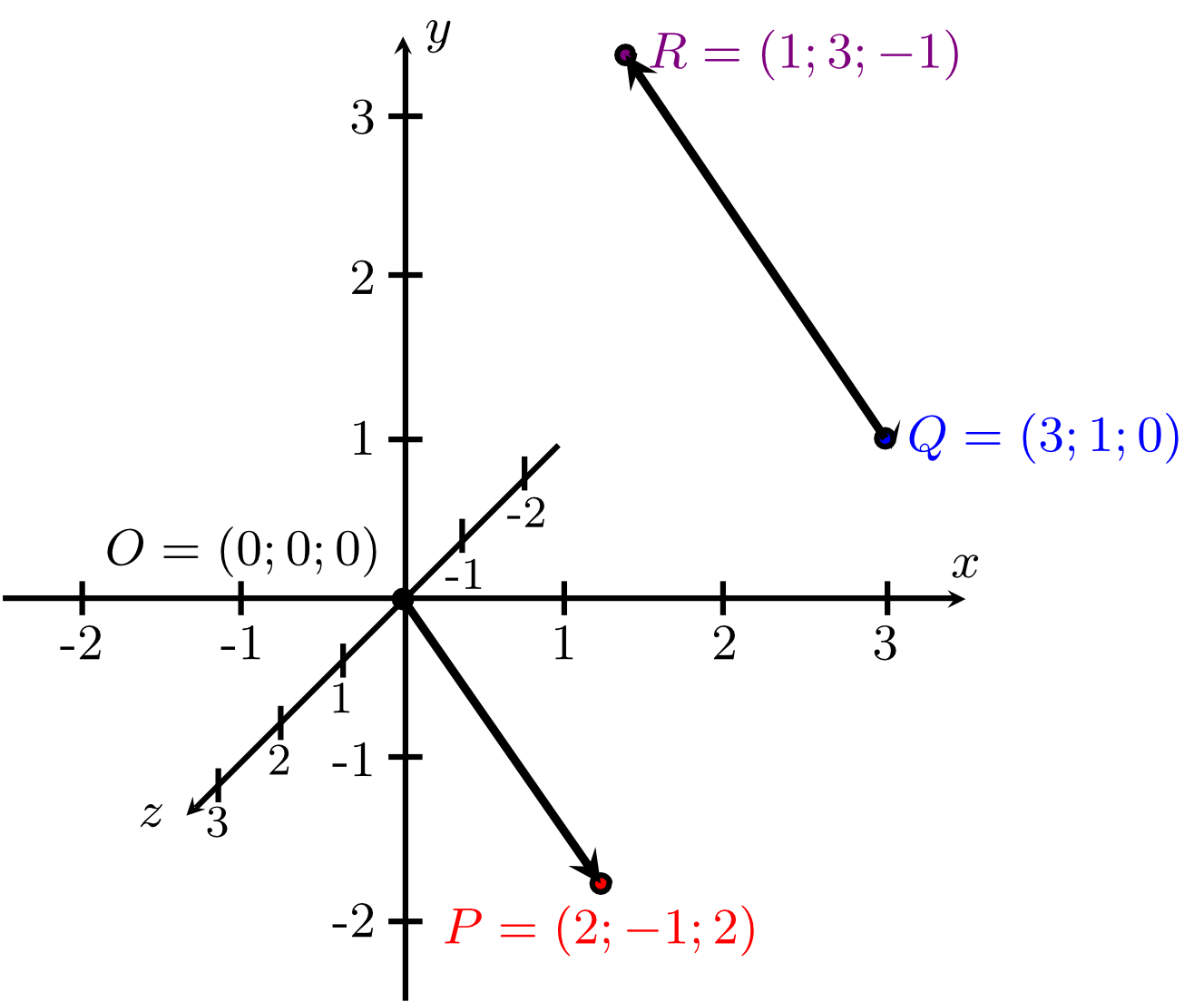
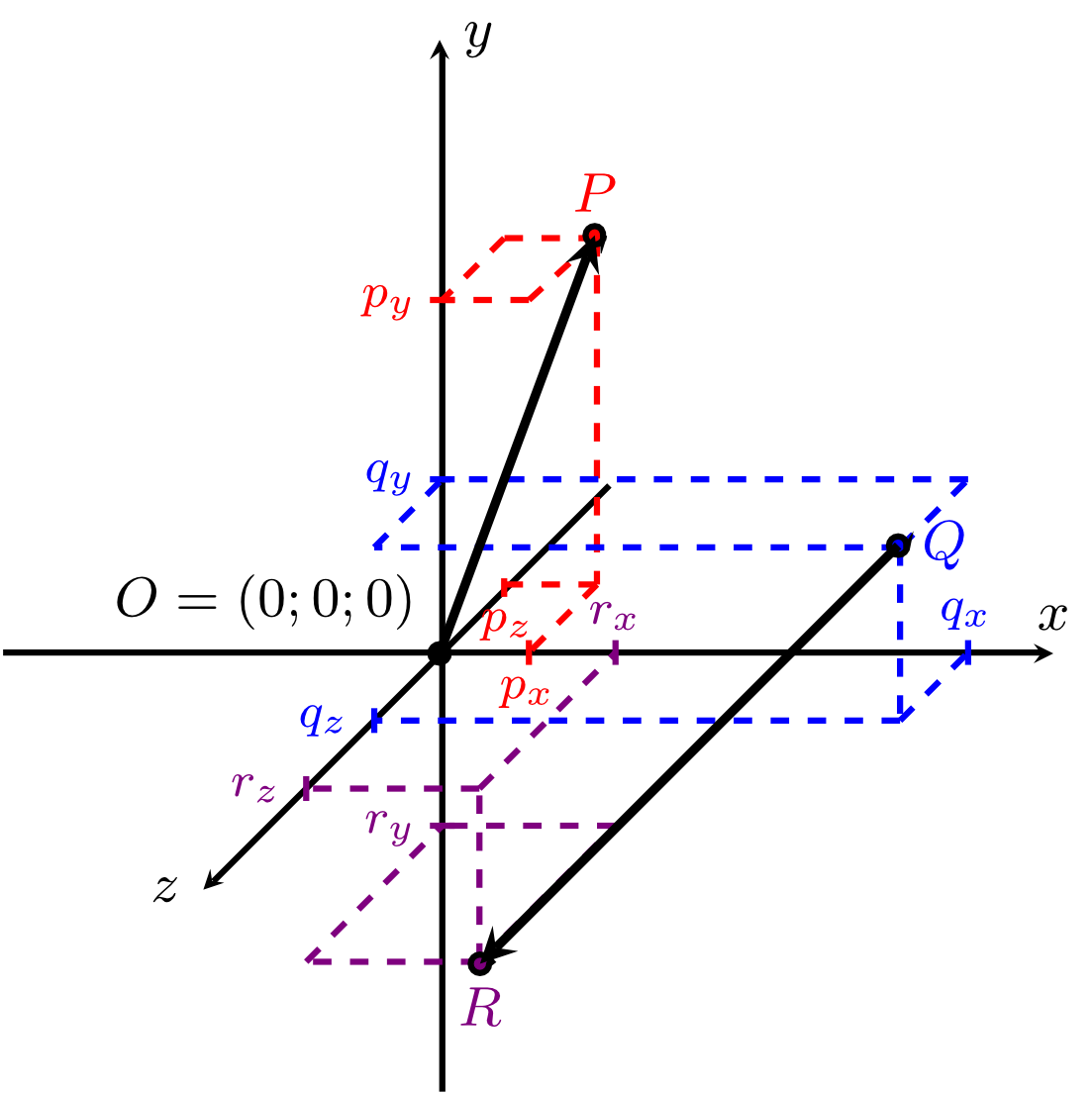
Points on the plane or in space that are defined as ordered pairs or triples with respect to a given coordinate system can be connected by line segments. Assigning a direction to these line segments (one of the end points of the segment is specified as the initial point and the other one is specified as the end point) results in arrows that point from one point to the other (see left and right figure below for the two-dimensional and the three-dimensional cases).According to these figures, an arrow provides the following information: it specifies how to get from the initial point (at the foot of the arrow) to the end point (at the tip of the arrow). For example, the arrow that connects the point to the point in the left figure above specifies that starting from the initial point one has to move units to the left and units upwards to get to the terminal point . In more mathematical terms: starting from , shift by in the -direction and by in the -direction. It is even simpler for the arrow that connects the origin to the point in the left figure above: to get from to move units in the -direction and unit in the -direction. Of course, these values are exactly the coordinates of the point .
Exercise 10.1.3
For the arrows in the right-hand side figure above (three-dimensional case), specify the (signed) movements in the three coordinate directions that are required to get from the initial point to the terminal point of the corresponding arrow. Proceed in the same way as explained above for two dimensions.
- For the arrow from to , we have:
- in the -direction: ,
- in the -direction: ,
- in the -direction:
.
- in the -direction: ,
- For the arrow from to , we have:
- in the -direction: ,
- in the -direction: ,
- in the -direction:
.
- in the -direction: ,
For the arrows connecting to , movements in the corresponding coordinate directions are determined by the coordinates of the points at the foot and at the tip of the arrows. Thus, in the two-dimensional case, we have:
and in the three-dimensional case:
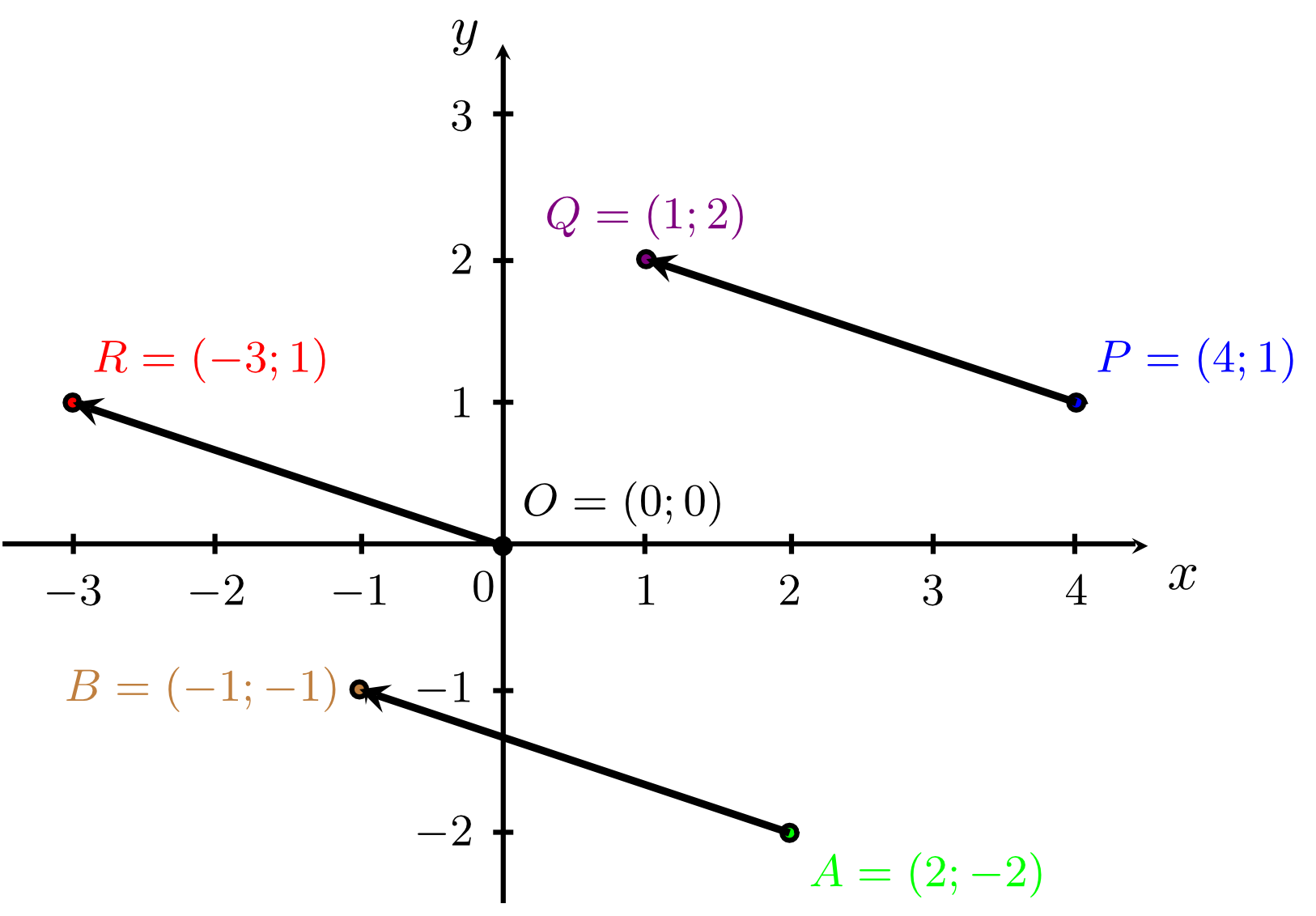
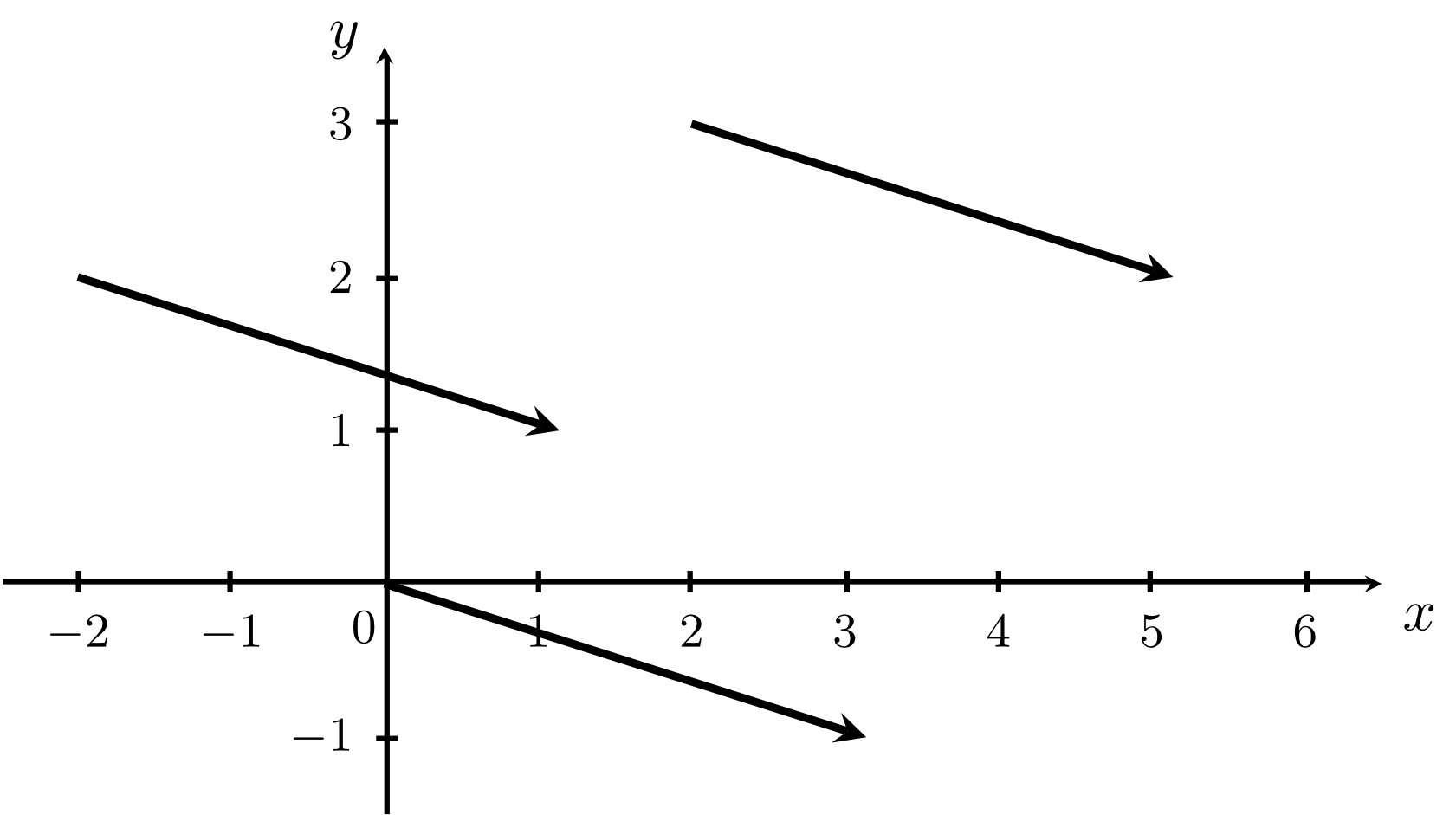
The movements in the different coordinate directions are the differences of the coordinates of the terminal point and the initial point of the arrow. This means that all arrows connecting pairs of points with equal coordinate differences only differ from each other by a parallel translation, i.e. they retain their direction. The pairs of points and , and , and indicated in the figure below are each connected by arrows that can be made to coincide by parallel translations. Here, an infinite number of pairs of points can be found that are connected by such an arrow. This idea works analogously in the three-dimensional case.
Each arrow in the figure above provides the same information, namely a shift by in the -direction and in the -direction. So what could be more natural than regarding each of these arrows only as a representation (a so-called representative) of a more basic object? This basic mathematical object is called vector, and in this case it has the two components: (-component) and (-component) that are written as a so-called -tuple one above the other:
The Info Box below outlines these conclusions and a few more notations and dictions concerning vectors.
Info 10.1.4
A two- or three-dimensional vector is a - or -tuple with or components called the -, - (and -)components. In general, vectors are denoted by lowercase italic letters accented by a right arrow or by upright boldface lowercase letters. The components of a vector are often denoted by the same lowercase italic letter as the vector, with the corresponding coordinate direction as its index:
An arrow in the plane or in space is called a representative of the vector if the arrow connects two points in the plane or in space such that the differences between the coordinates at the initial and end points of the arrow give the components of the vector.
Often, a point or two points and in the plane or in space are given and one wants to specify the vector that has the arrow from the origin to the given point or the arrow connecting to as its representatives. The Info Box below outlines the notation and diction as well as the required vector operation:
Info 10.1.5
- Two-dimensional case:
Let , , and be points in the plane. Then the vector
is called the connecting vector from the initial point to the terminal point , and
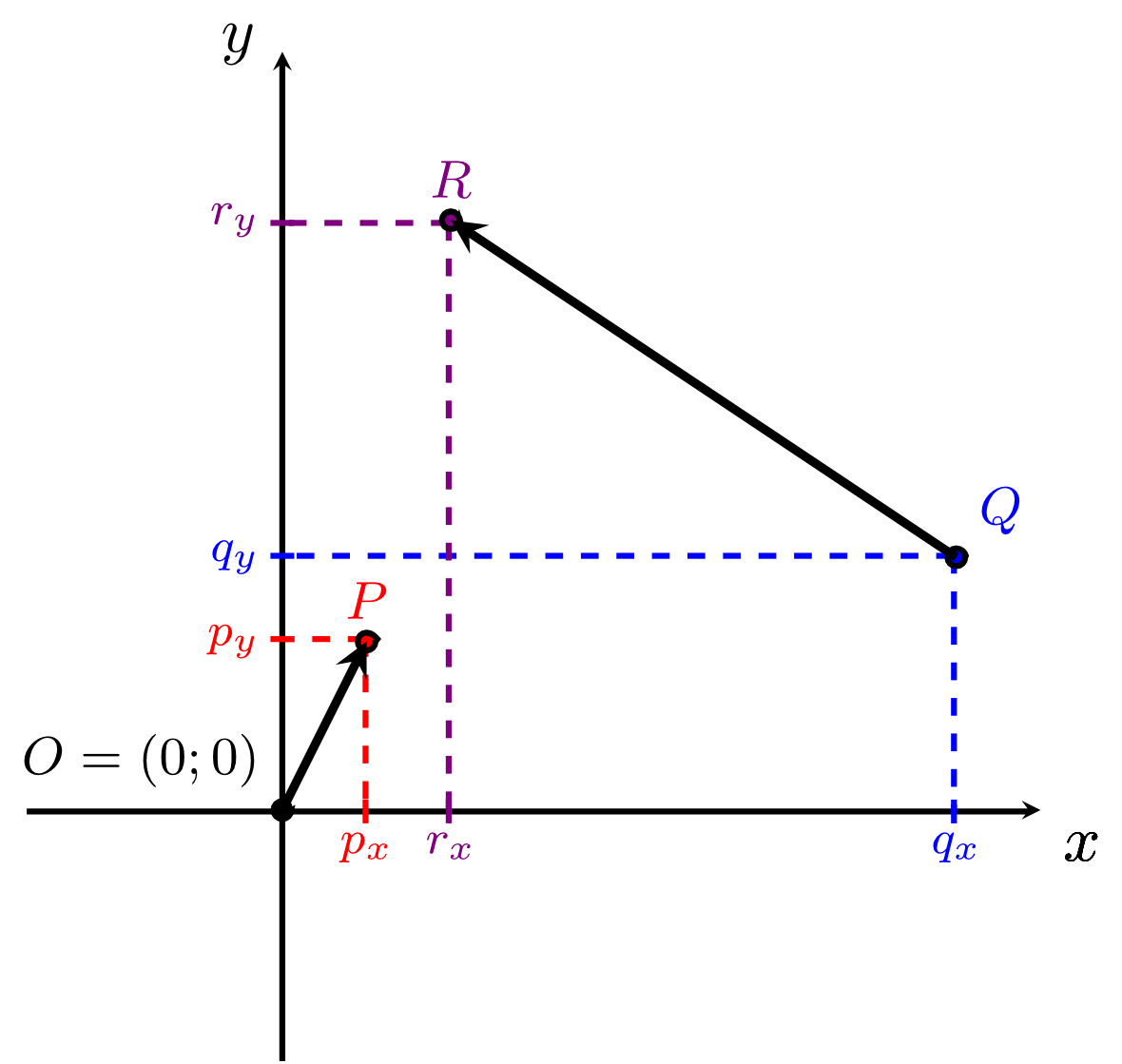
is called the position vector of the point . These are exactly those vectors whose representatives include the connecting arrows of the points (see figure below).
- Three-dimensional case:
Let , , and be points in space. Then the vector
is called the connecting vector from the initial point to the point , and
is called the position vector of the point . These are exactly those vectors whose representatives include the connecting arrows of the points (see figure below).
Example 10.1.6
- Two-dimensional case:
The point has the position vector
The vector
is the connecting vector from the point to the point . Thus, we have
However, since
- Three-dimensional case:
Consider the two points and . The connecting vector from to is:
However, the connecting vector from to is
Obviously, the vector
is also the position vector of the point .
The example above reveals an interesting fact: reversing the orientation of a vector (and thus the orientation of all its representative arrows) results in a vector in which all components have the opposite sign. This vector is also called the opposite vector. This suggests that vector calculations can be carried out component-wise. This will be discussed in detail in Subsection 10.1.4.
Obviously, the also exists a vector with all its components equal to in the two- and three-dimensional cases:
This vector is called the (two-dimensional or three-dimensional) zero vector. One can imagine the zero vector as having "arrows of zero length" as its representatives, i.e. arrows that connect a point with itself. In other words, the zero vector is the position vector of the origin.
Exercise 10.1.7
Let the points
be given in the plane, and the points
in space as well, as the (two- and three-dimensional) vectors
be given in the plane, and the points
in space as well, as the (two- and three-dimensional) vectors
- Find the following vectors:
-
- Find the points in the plane and in space such that the following statements are true:
-
- Draw at least three representatives of the vector .
The previous introduction of the concept of a vector reveals the close relationship between vectors and points. Indeed, there is a one-to-one correspondence between points and position vectors: for every point there exists exactly one vector that is the position vector of this point. Conversely, for every vector there exists exactly one point that has this vector as its position vector. This is true in both the two-dimensional and the three-dimensional cases. This justifies the convention we will follow below: describing points by their position vectors. A point , for example, is often described by its corresponding position vector instead of its coordinates . If geometric objects such as lines and planes are investigated (see e.g. Subsection 10.2.2), this convention also involves certain advantages in the description of these objects (in particular in the three-dimensional case).
Moreover, this one-to-one correspondence between points and position vectors also justifies to use the abbreviations and not only for the set of all points in the plane or in space but also for the set of all two-dimensional or three-dimensional vectors. These abbreviations will also be used throughout the following sections.
