Chapter 10 Basic Concepts of Descriptive Vector Geometry
Section 10.1 From Arrows to Vectors10.1.4 Simple Vector Operations
In this section we discuss what kinds of vector operations we can carry out on the vectors introduced in the previous Section 10.1.3. We can view vector operations in two different ways. First you can carry out the vector operations of addition, subtraction and - with a certain restriction - multiplication on vectors specified as - or -tuples. On the other hand, these operations can be interpreted graphically with respect to the arrows representing the vectors. That is, the vector operations on vectors can be interpreted as geometric operations on their representatives. This geometric interpretation of vector operations leads to a deeper understanding of position vectors and connecting vectors of points.
Vector operations in two and three dimensions are carried out in essentially the same way. For all component-wise vector operations presented below both cases (two-dimensional and three-dimensional) are considered. The corresponding figures illustrate the geometric interpretation of the operations on the representatives of the vectors and visualise the position and connecting vectors. They will mostly show only arrows and points without a coordinate system. In this way, the figures apply to both the two-dimensional and the three-dimensional case.
Since vectors will be transformed below by equivalent transformations into each other, we need to specify under which conditions two vectors are considered to be equal.
Info 10.1.8
Two vectors are equal (written as ) if and only if they satisfy one (and hence all) of the following equivalent conditions:
- and have the same components:
in the two-dimensional case or
in the three-dimensional case. This is also known as comparison of coordinates or components.
- and have the same representatives.
- and are both the position vector of the same point.
- and are both the connecting vector of the same two points.
From the statements in the Info Box above we see that two vectors of different dimensions (i.e. and ) can never be equal. Since these vectors have a different number of components, they are not even comparable. Thus, vector operations are only carried out on vectors with an equal number (two or three) of components , and these operations will always result in a vector with this fixed number of components.
Info 10.1.9
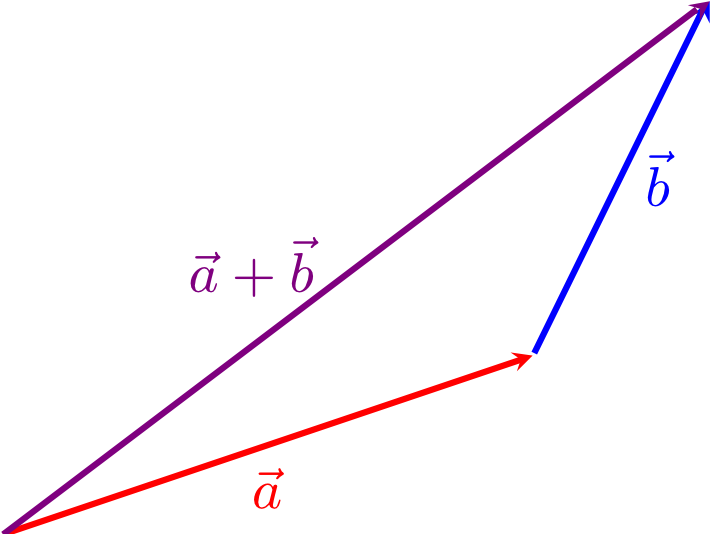
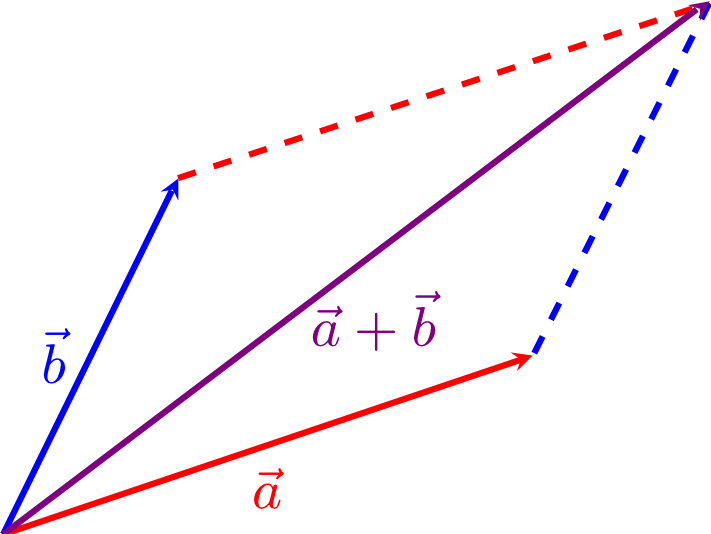
The addition of two vectors involves the addition of all their components, i.e.
in the two-dimensional case and
in the three-dimensional case. Geometrically, vector addition can be interpreted as either a"linking" of two arrows or a completion of two arrows to a parallelogram, depending on which representatives of the vectors are used:
The laws of associativity and commutativity apply to the addition of two vectors as to the addition of real numbers (see Section 1.1.3):
and
The zero vector or plays the same role for vectors as the number for the real numbers:

Exercise 10.1.11
- Let the vectors and be given. Calculate .
- Let the points , , and be given. Which of the following expressions are equivalent to the expression ?
When we study possible operations on vectors further, we will see that the component-wise multiplication or division of vectors is not a meaningful operation. To understand this, however, would go far beyond the scope of this course. At this point you simply have to accept that vectors cannot be multiplied that simply, let alone divided. What we certainly can do is multiply vectors by real numbers and - based on that - subtract vectors. Please note: if we speak of the length of a vector in the following section, we mean the geometric length of the arrows representing this vector. The concept of the length (a.k.a. absolute value or norm) of a vector will be discussed in more detail later on.
Info 10.1.12
The multiplication of a vector by a real number involves the multiplication of each component by this real number. If is a vector and , then we have
in the two-dimensional case and
in the three-dimensional case. The division of a vector by a number is then simply defined as its multiplication by the reciprocal :
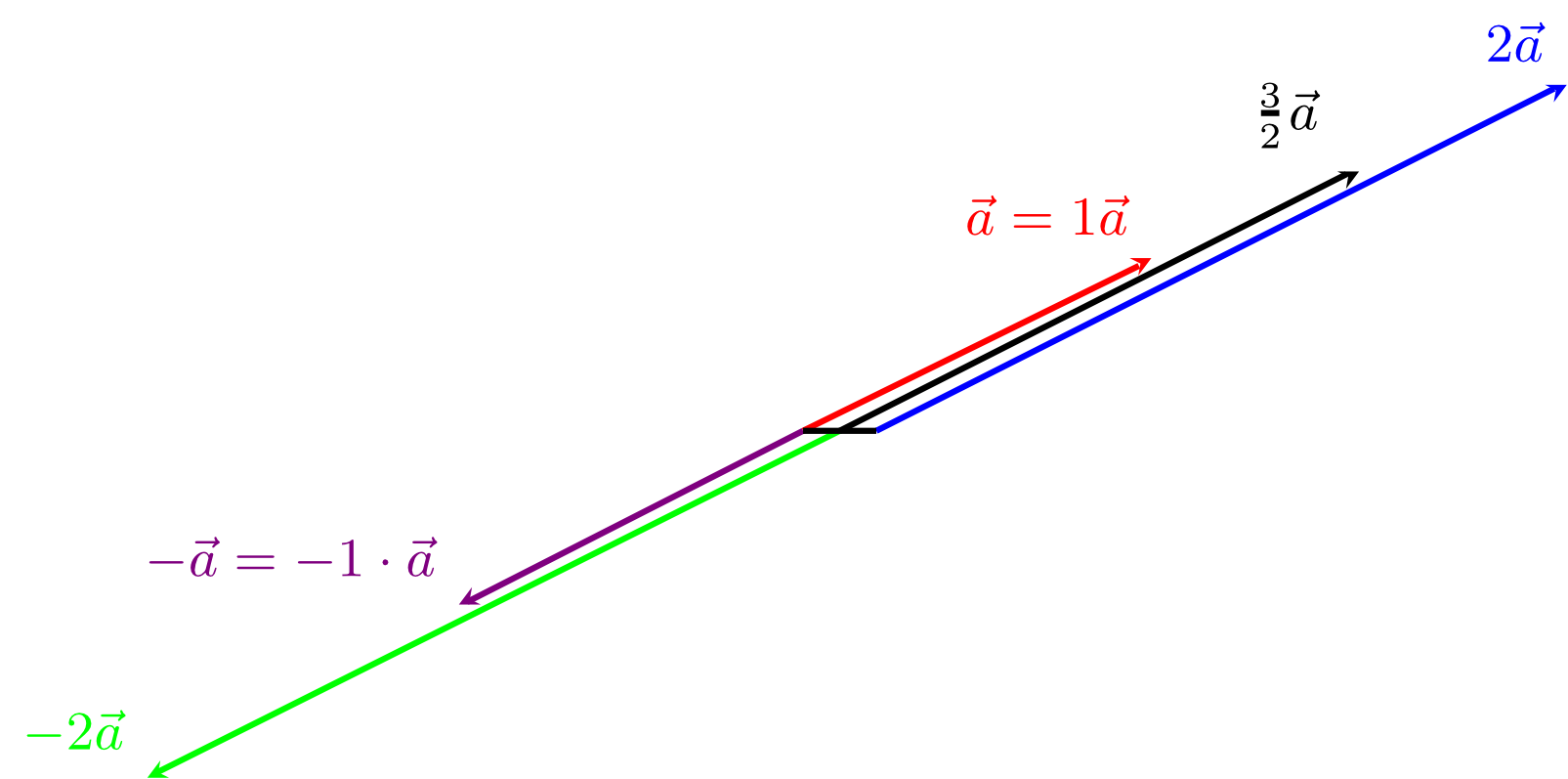
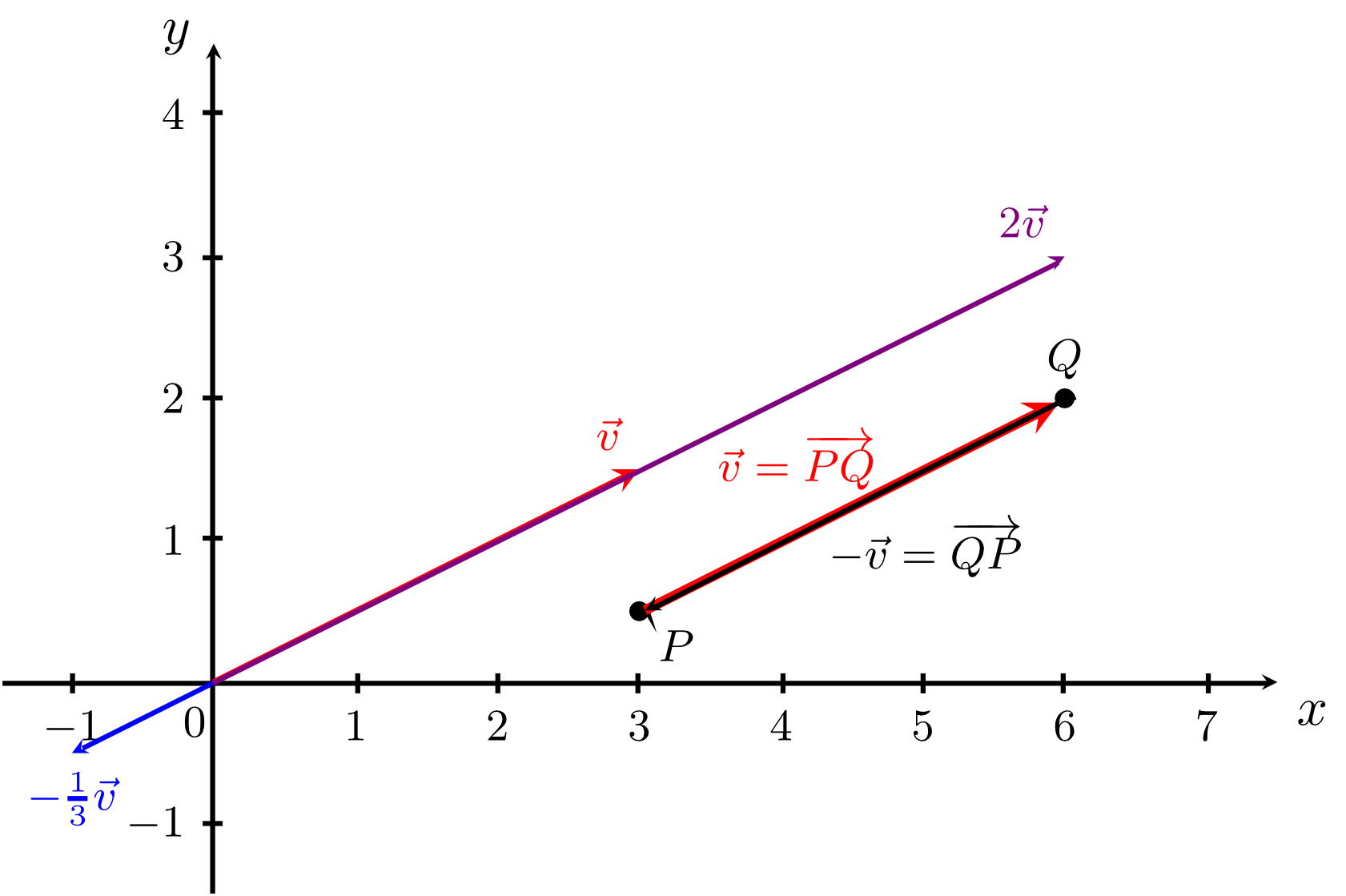
Thus, multiplying a vector by a real number , results in an equally oriented vector that is stretched by a factor of . For , , the resulting vector is also stretched by a factor of but it is flipped around by an angle of . In the special case of , we obviously have
for every vector . Two other relevant cases are the multiplication by a factor of
- which obviously leaves the vector unchanged - and the multiplication by
- which results in the so-called opposite vector. This is a vector of equal length and opposite orientation. This is illustrated in the figure below. Since the multiplication by real numbers changes the length (scales the vectors), real numbers with respect to vectors are often called scalars, and the multiplication of a vector by a real number is called scalar multiplication.
The following calculation rules apply to scalar multiplication:
Info 10.1.14
Let two real numbers and and two vectors and be given. Then the following calculation rules apply:
-
-
-
-
-
- or
Using the concept of an opposite vector we are now able to specify what the subtraction of vectors means.
Info 10.1.15
Let two vectors and be given. Then, their difference is the sum of and the opposite vector of . Thus, we have
in the two-dimensional case and
in the three-dimensional case. The difference of vectors can also be interpreted geometrically by means of the representatives as illustrated in the figure below.
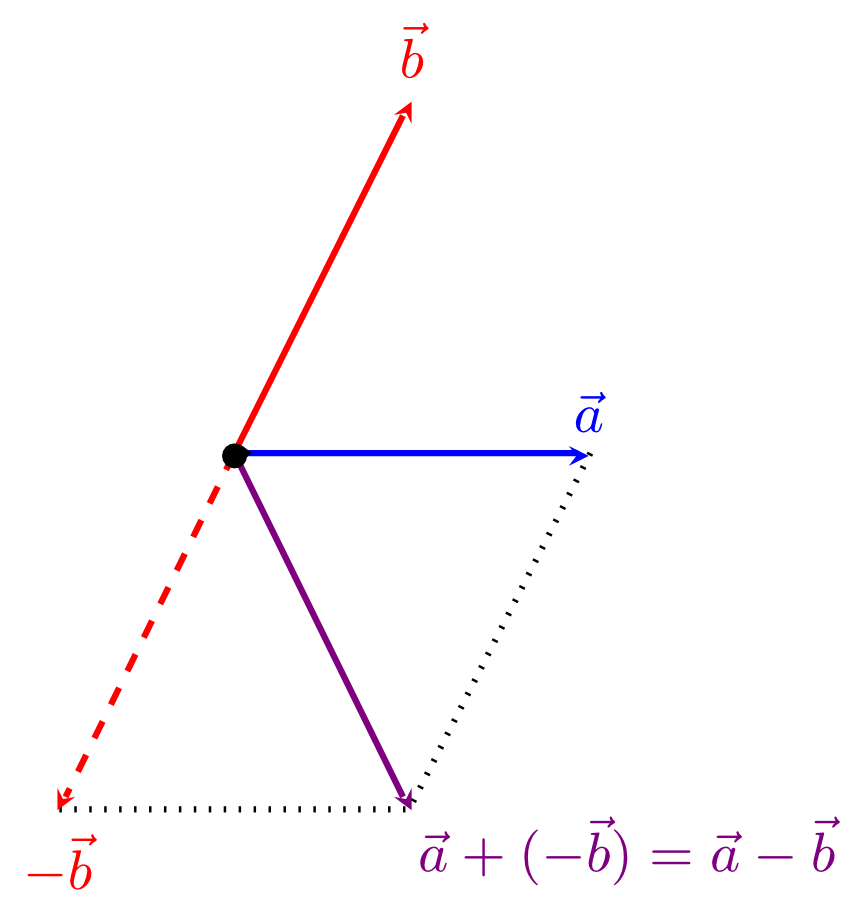
If we only consider the difference of vectors by means of their components, the question arises what the concept of an opposite vector here is required for. Indeed, the difference of vectors in componentwise notation could also be written analogously to the sum without using the concept of an opposite vector. However, if we think of the geometrical interpretation of the difference by means of representatives (see figure in the Info Box above), we see that a geometrical interpretation is only possible using the concept of an opposite vector.
Example 10.1.16
This example shows typical problems involving the calculation rules for vectors presented so far.
- Simplify the following vector expressions:
- ,
- für .
- ,
- Let two vectors and be given. Find the unknown vector in the equation
Solving for and substituting and results in
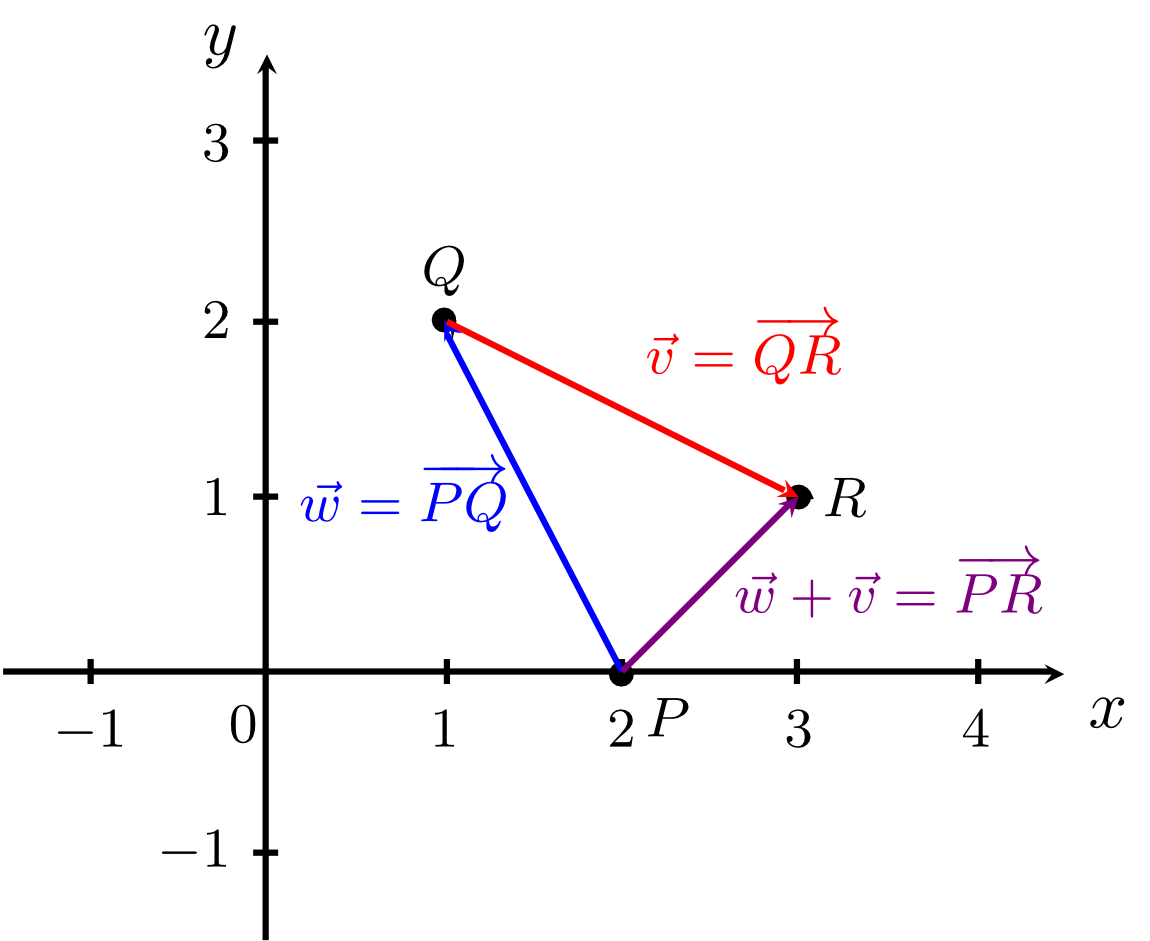
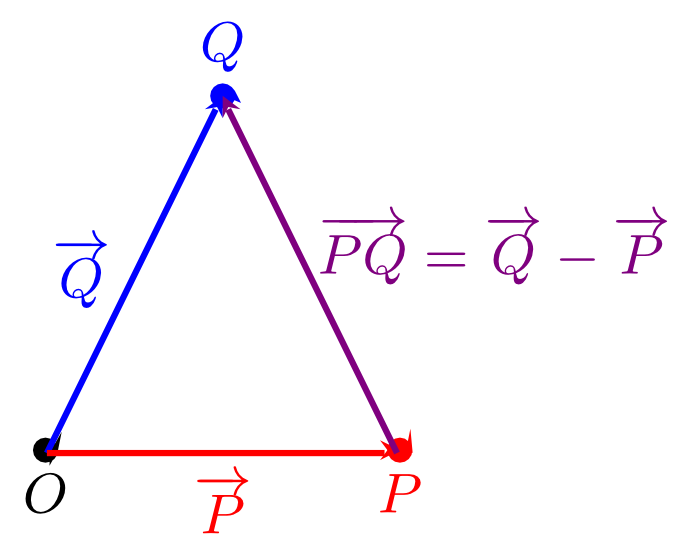
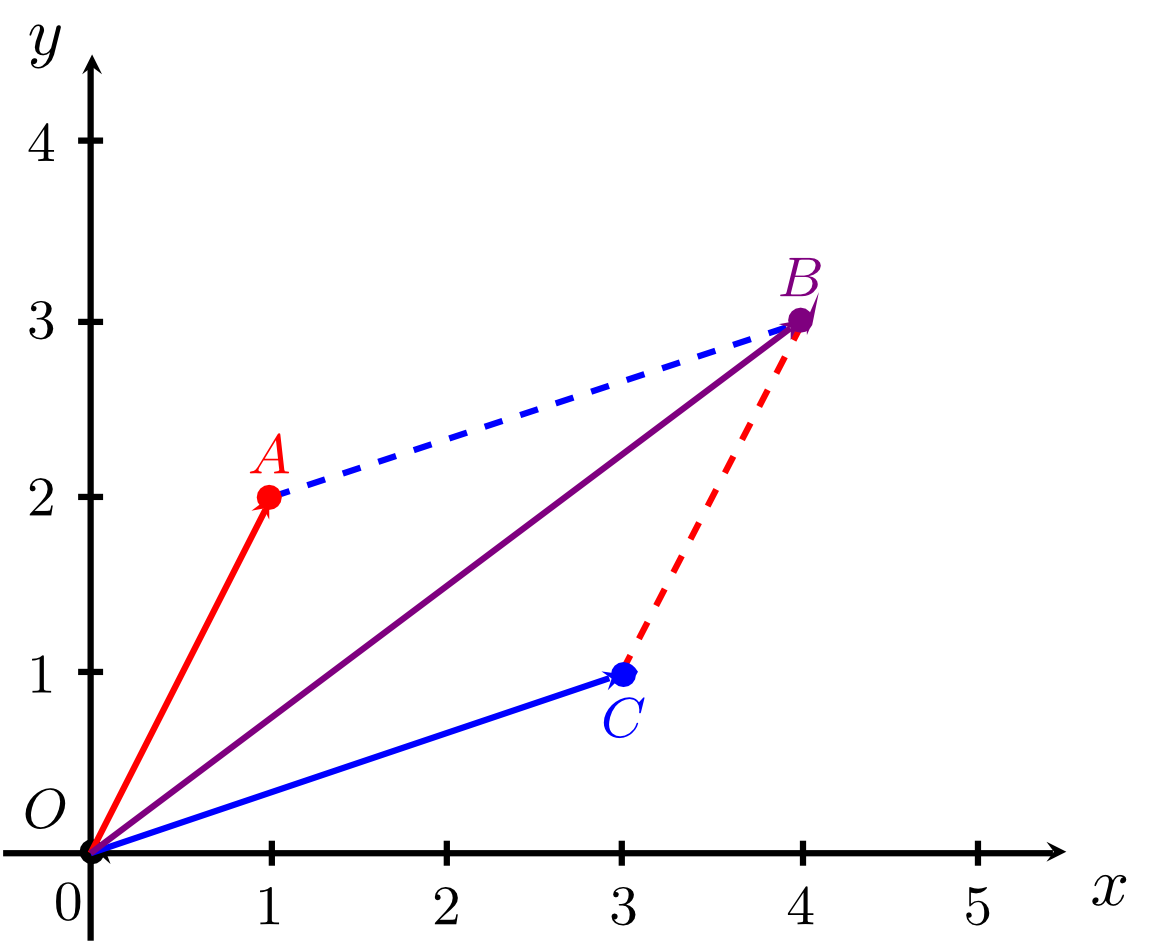
- Using the difference of vectors, specify the connecting vector of the two points and by means of the position vectors and . We have:
The connecting vector from a point to a point is always the difference of the position vector (to the terminal point of the connecting vector) and the position vector (to the initial point of the connecting vector). This is illustrated in the figure below and can also be seen from the calculation rule for connecting vectors outlined in Info Box 10.1.5.
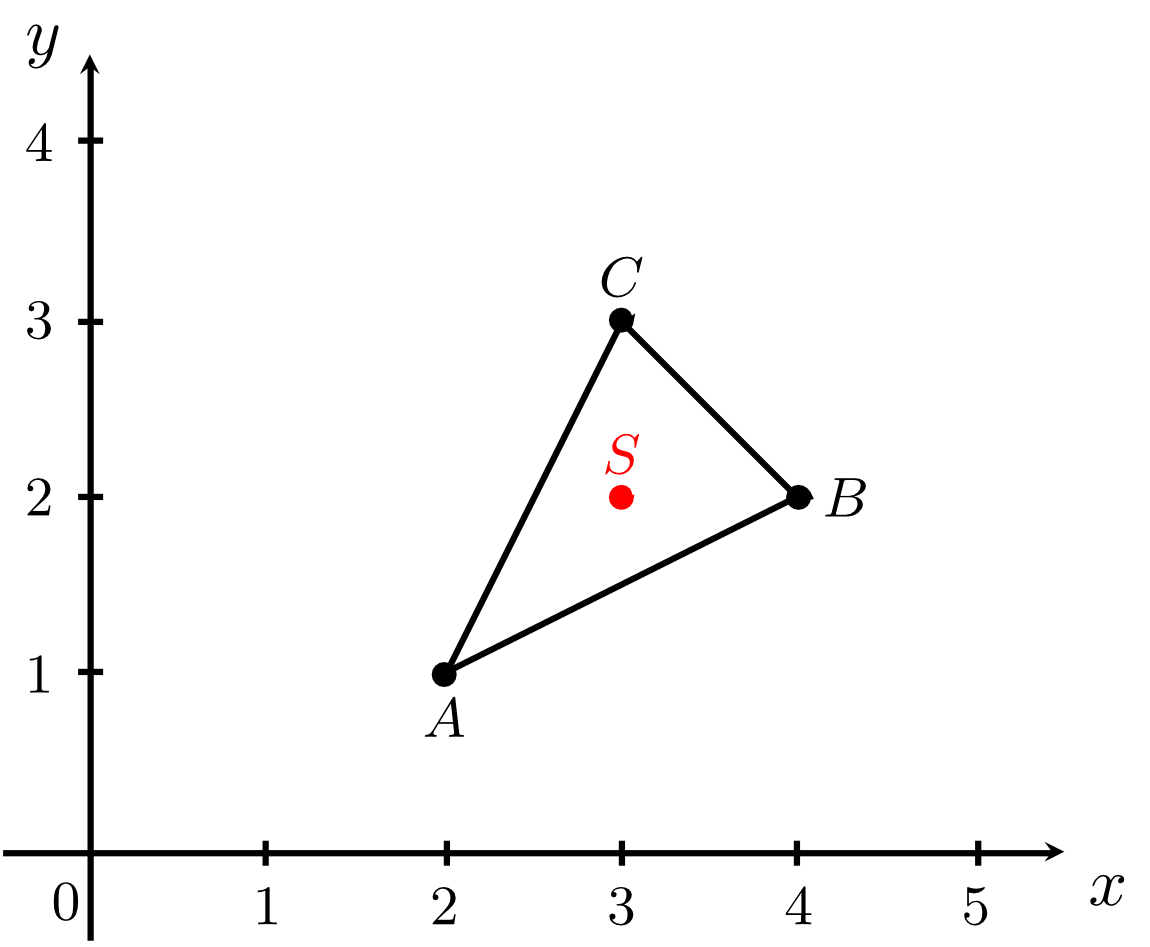
- The points , , and are the vertices of a triangle. The (geometric) centroid of this triangle can be calculated by means of the corresponding position vectors:
Thus, we have . This is illustrated in the figure below.
Exercise 10.1.17
- Let , , , and be points in space. Simplify the expression
as far as possible.
- Show that the points , , and together with the origin form the vertices of a parallelogram.
Exercise 10.1.18
Simplify the following expressions as far as possible:
- .
- .
Exercise 10.1.19
Find the vector in the equation
Since any vector has an arbitrary number of arrows as its representatives (which arise from each other by parallel translation), all these representatives have the same geometrical length (which is always the distance between the two points they connect). Therefore, it is reasonable to speak of the length of a vector. In mathematics, the length of a vector is called the absolute value or norm.
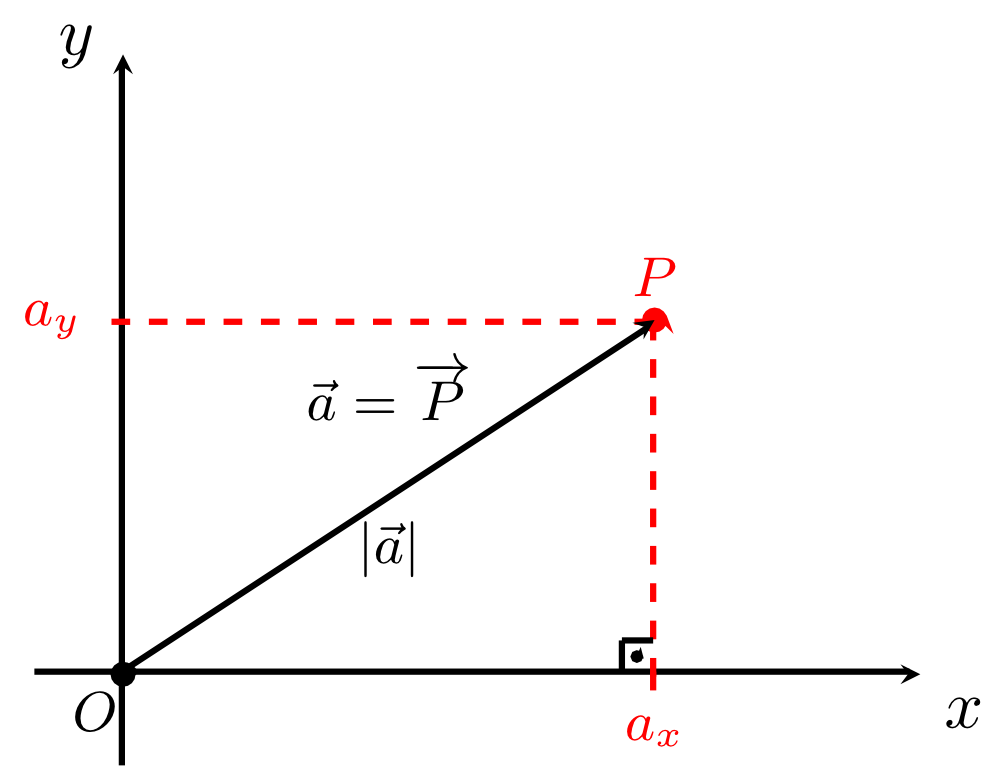
Info 10.1.20
The absolute value or norm of a vector is denoted by and equals the distance between the origin and the point that has the vector as its corresponding position vector (i.e. ). Thus, we have generally
and hence in the two-dimensional case
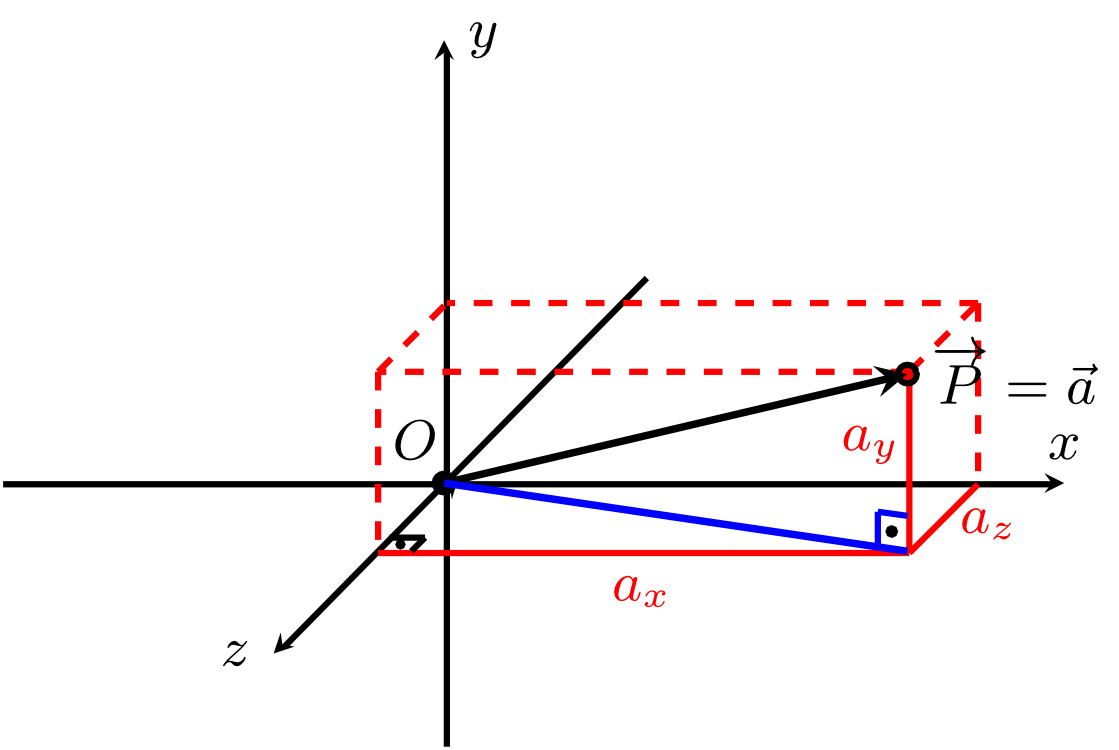
or in the three-dimensional case
A vector with an absolute value of is also called the unit vector.
For norms of vectors the following calculation rules apply:
Info 10.1.21
Let two vectors and (both in or in ) and a real number be given. Then, we have:
- and ,
- , and
- .
Example 10.1.22
- The absolute value of the vector is
Hence, this is a unit vector.
- Find a number such that .
Exercise 10.1.23
Calculate
.
.
Exercise 10.1.24
Find the number such that .
.
.
Exercise 10.1.25
Show that the points , , and are the vertices of an equilateral triangle.
:
- Base
- Constant
- Dimension
- Distance
- Equation
- Equilateral triangle
- If and only if
- Inequality
- Link
- Operation
- Ordinate
- Orientation
- Origin
- Parallel
- Property
- Pythagoras
- Ratio
- Real number
- Right triangle
- Scalar
- Scalar multiplication
- Space
- Space
- Strict
- Term
- Theorem
- Transformation
- Triangle
- Triangle inequality
- Unit vector
- Value
