Chapter 10 Basic Concepts of Descriptive Vector Geometry
Section 10.2 Lines and Planes10.2.2 Lines in the Plane and in Space
In Module 9 we described lines in the plane using coordinate equations for the points lying on the lines with respect to a fixed coordinate system. In this way, for example, a line with slope and -intercept is given as the set of pointswhich is often abbreviated by specifying only the coordinate equation of a line (here in normal form):
The figure below shows this line.
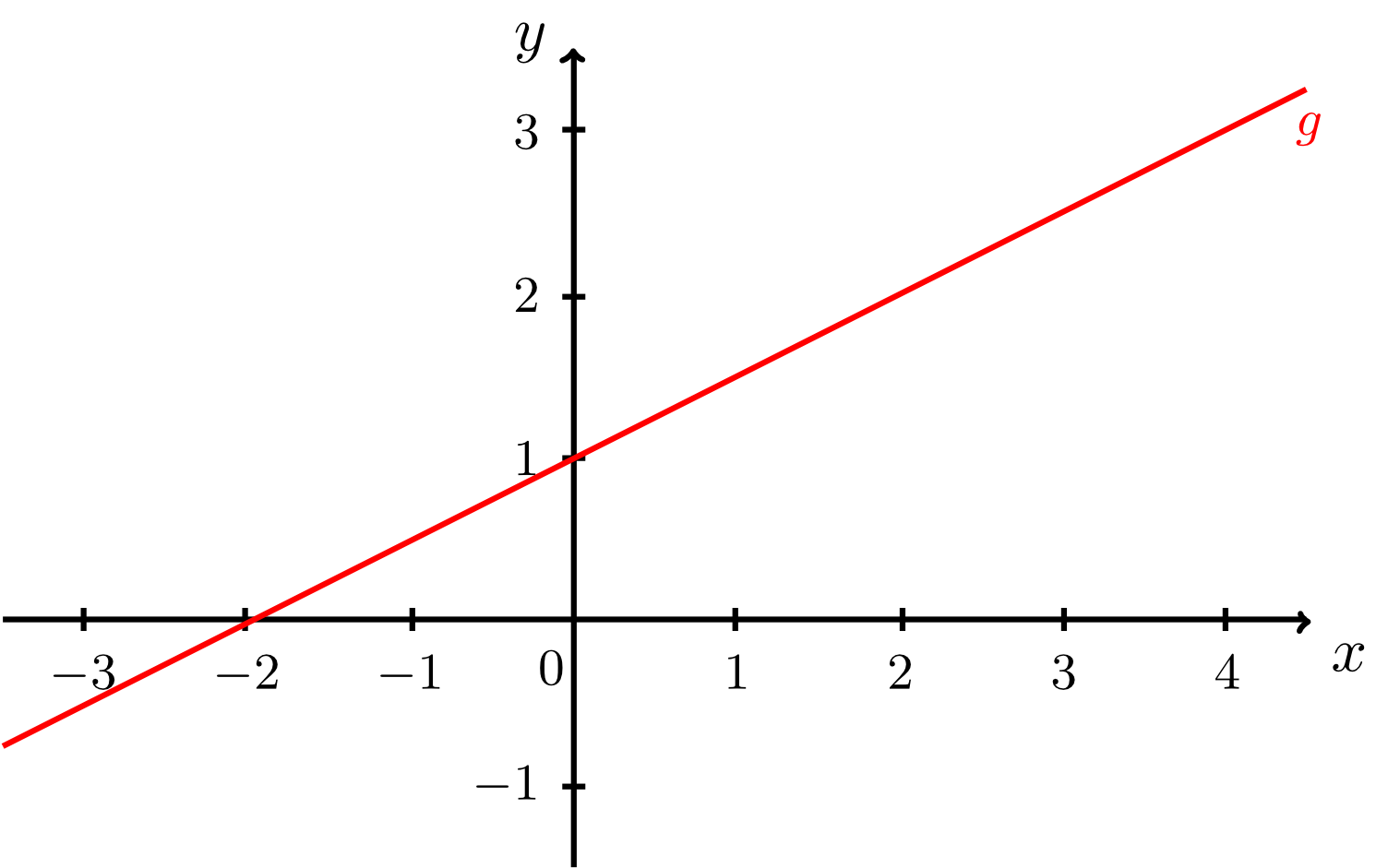
In the following sections we want to describe the points on the line by only their corresponding position vectors. The considerations outlined below result in the following description: the coordinates of the points lying on the line satisfy the equation
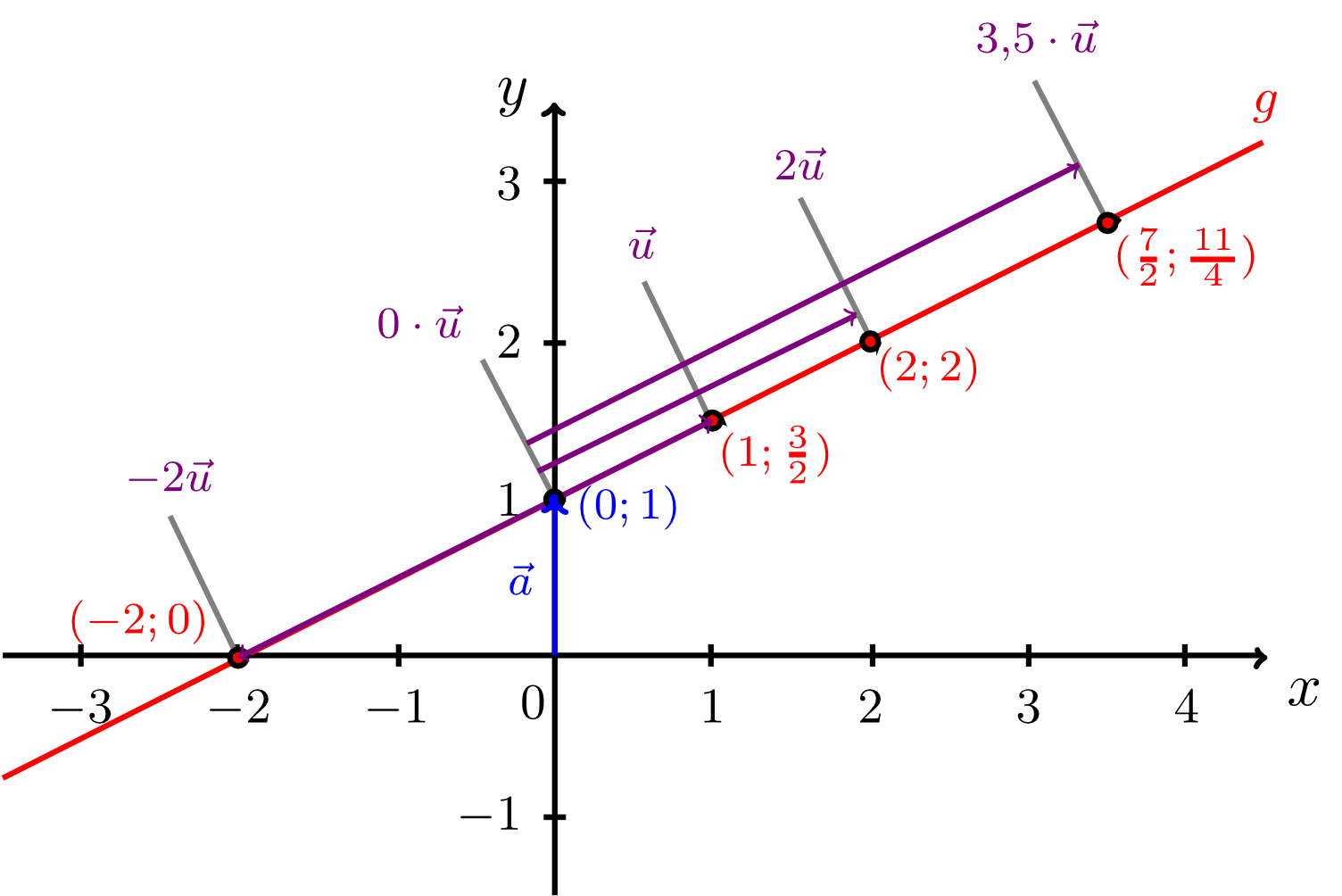
This equation can be substituted into the description of the point. Then, we see that the line consists of points of the form with . Let the corresponding position vectors of these points be denoted by . Then, we have
with . Using position vectors, the line can also be described by
In other words: The points of are defined by the sum of the vector and all possible multiples of the vector , i.e. all vectors collinear to the vector . The figure below illustrates this approach.
The Info Box below outlines the most relevant terms, methods and concepts for this so-called vector form or parametric form of an equation of a line.
Info 10.2.2
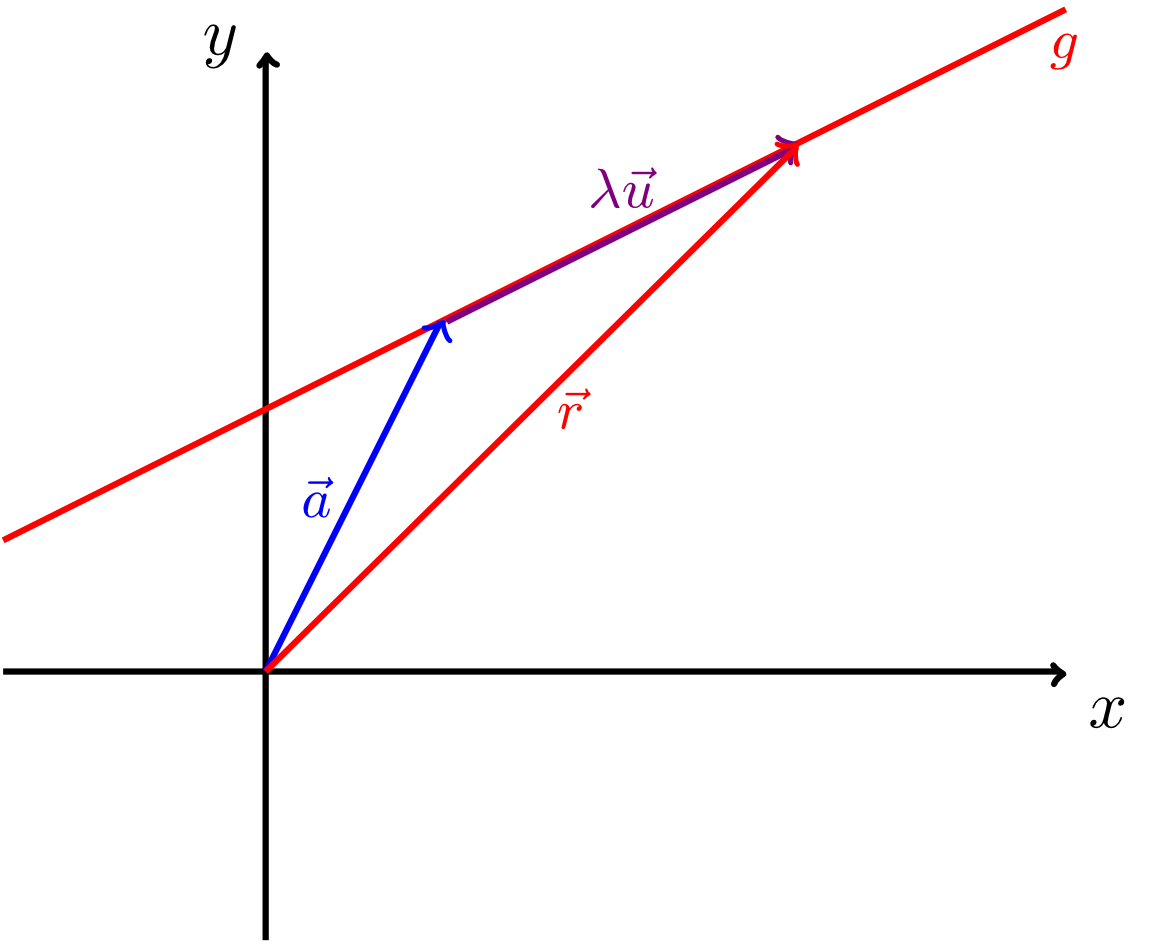
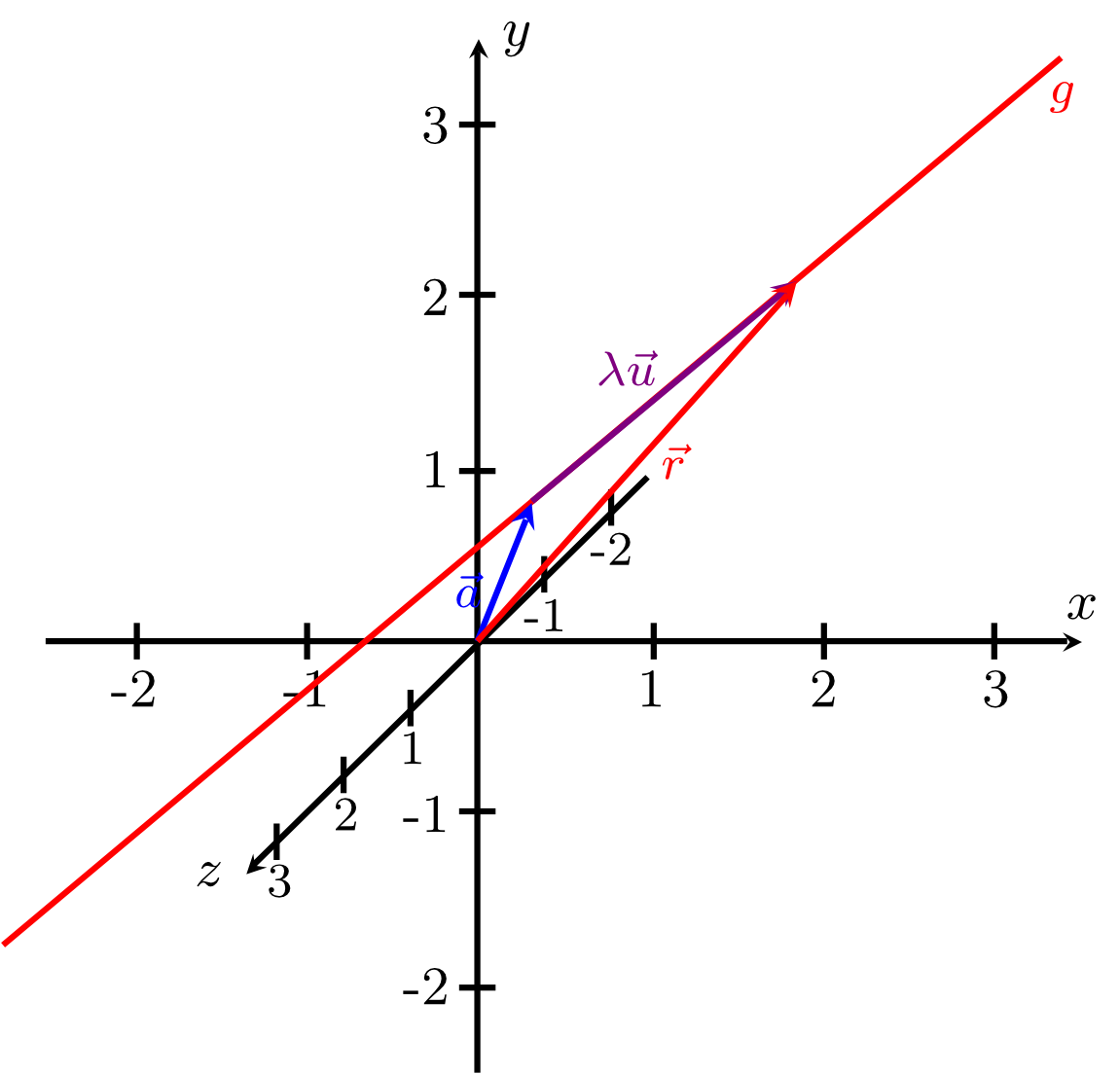
- A line in the plane is given in vector form or in parametric form as the set of position vectors
often written in short as
Here, is called a parameter, is called the reference vector, and is called he direction vector of the line. The position vectors point to the individual points on the line. The reference vector is the position vector of a fixed point on the line that is called a reference point. The multiples of the direction vector are all vectors collinear to (see figure below).
- For a line given in normal form by the equation
the vector form of the equation of a line can be found by generating the position vectors . Then, the vector form of the equation of a line is
with the direction vector and the reference vector .
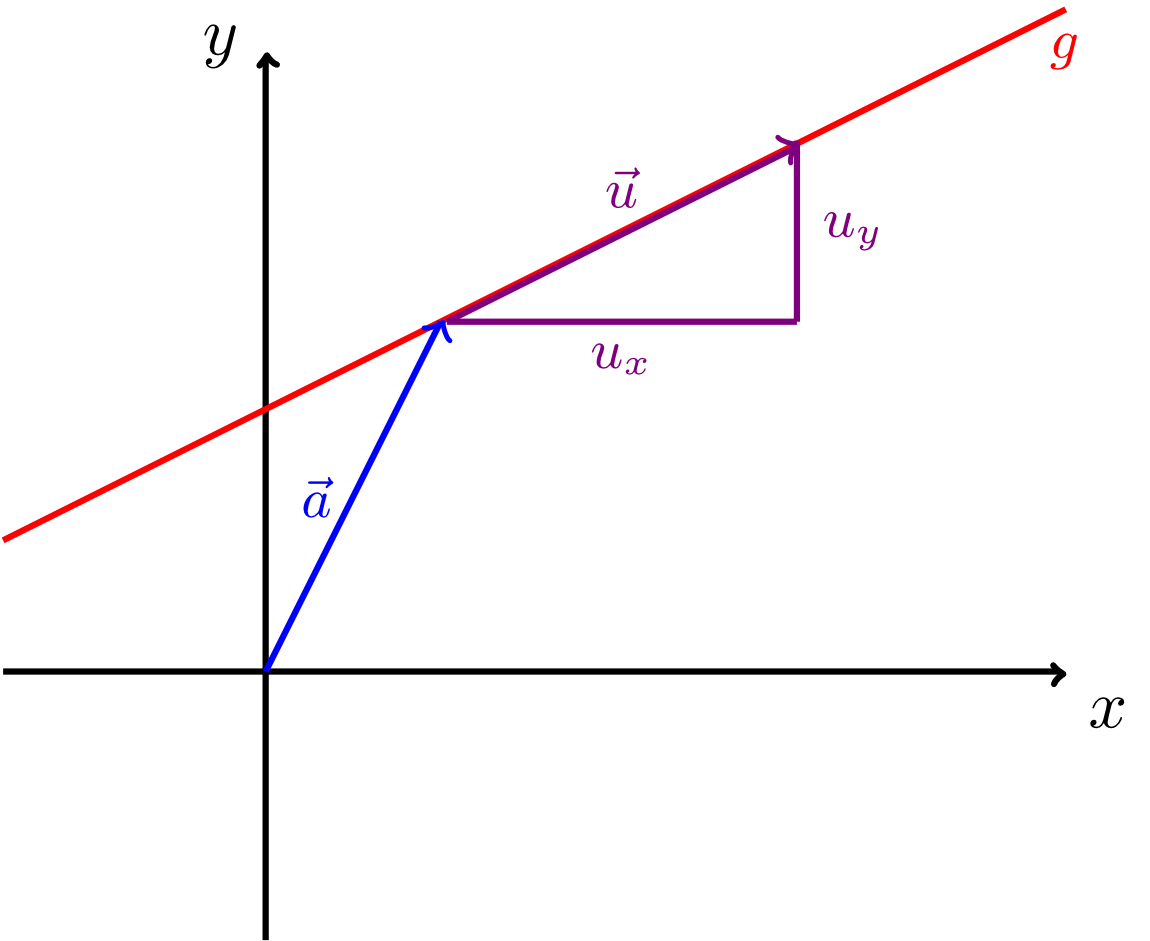
- For a line given by the equation in parametric form:
the corresponding equation of the line can be found as follows: the direction vector immediately provides the slope of the line via a slope triangle. We have
(Here, must be non-zero, i.e. . The special case is discussed in the example below.) From Section 9.2.2 we know that we only need another point on the line to determine the -intercept and specify the equation of the line in normal form. It is easiest to use the reference point for this.
in coordinate form discussed in the first example of the subsection is not only described by the vector equation
in parametric form, but also by the equations
or
Often representations are chosen such that the direction vector is as simple as possible. However, for representations of the same line by different direction vectors or reference vectors, different parameter values have to be used since in different representations the same parameter value defines different points on the line. For example, the parameter value defines, in the corresponding parametric equation of , the point
but the parameter value defines, in the corresponding parametric equation of , the point
The example below lists a few applications of equations of a line in vector form.
Example 10.2.3
- Let the line in the plane be given by the equation
Find two different equations of a line of in vector form.
First, we transform the equation of a line into normal form:
Thus, points on the line have the form , described by the position vector , . Hence, one possible parametric form is given by
Choosing another direction vector collinear to and another reference point on results in another equation of a line in parametric form. For example, is collinear to since . is another appropriate reference vector since the coordinates of the point obviously satisfy the equation of a line. Hence,
is another possible parametric form of an equation of the line .
- In the case of a line with an equation that cannot be transformed into normal form, such as
an equation in parametric form can still be given.
All points on the line have the form for , with the corresponding position vector for . Since , one possible vector form of is given by
- Let the line be given in parametric form by
Find the corresponding equation of a line in normal form.
The direction vector gives the slope . Thus, the equation of the line in normal form is
The reference vector of is . The reference point can be substituted into the equation of the line to determine the -intercept:
Thus, we have
- If, for example, a line is given by the equation
in parametric form, where the -component of the direction vector is , the corresponding equation of the line in component form can be found.
The direction vector with an -component of implies that the line is parallel to the -axis. Hence, the equation of the line has the form
The constant can be determined by substituting the reference point into this equation resulting in , and we get
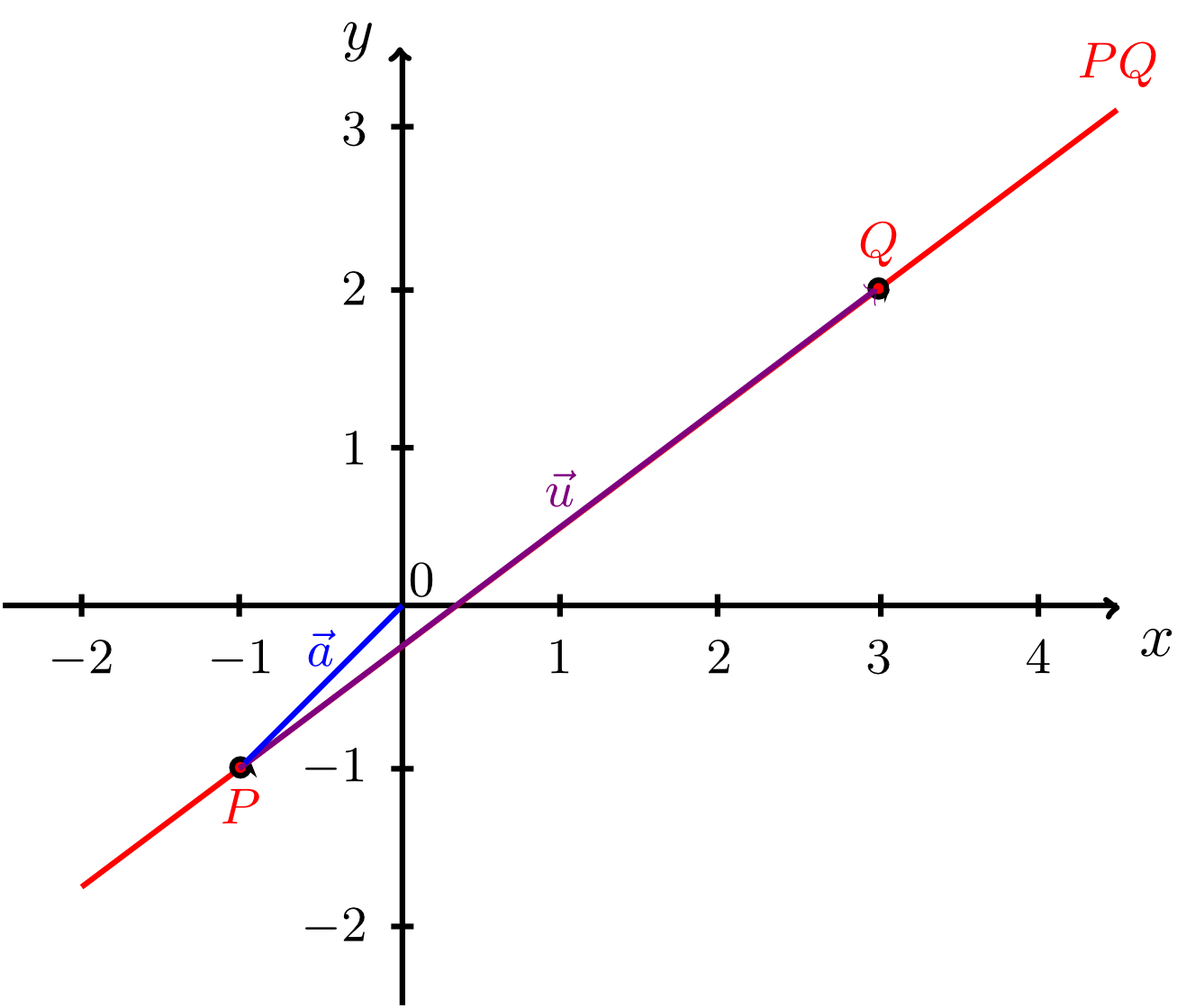
- Given the two points and , find the equation of a line of in parametric form.
For the direction vector we the connection vector
and for the reference vector we use the position vector of a given point, for example,
Thus, we have
The line is shown in the figure below.
Exercise 10.2.4
- Let the line be given by the equation
in parametric form. Find the equation in normal form:
.
- The line with the equation of a line in coordinate form
has the parametric form
Find the missing values of and .
- Consider the two points and . Which of the following parametric equations are correct representations of the line ?
(i) (ii) (iii) (iv) (v) (vi)
- Find the value of such that the point with the position vector
lies on the line
and find the value of the parameter such that .
In contrast to lines in the plane, lines in space cannot be described by an equation of a line in coordinate form. However, the description by a parametric equation can be easily extended from two to three dimensions (see Info Box below).
In this three-dimensional case, as in the plane, the parametric form of the equation of a line is not unique. The example below lists a few applications of parametric equations of a line in space.
Example 10.2.6
Let the two points and in space be given. Find two different representations of the line in parametric form.
We use the connecting vector as direction vector:
The point can be used as reference point. For the parametric form we get
Further possible direction vectors must be collinear to the vector . For example:
We can also use the point as reference point which results in
as another correct equation of the line in vector form.
We use the connecting vector as direction vector:
The point can be used as reference point. For the parametric form we get
Further possible direction vectors must be collinear to the vector . For example:
We can also use the point as reference point which results in
as another correct equation of the line in vector form.
Exercise 10.2.7
- The line through the points and has the parametric equation
Find the missing values of , , , and .
- Find the value of such that the point with the position vector
lies on the line
and find the value of the parameter such that .
